无人机研究与制作
作 者:于 玺(高二五班无人机研制组组长)
班 级:高二(5)班
摘 要
随着人类科技水平的不断进步,无人机已经成为众多热门科技产品之一,越来越受到人们的关注。 本文介绍了无人机的飞行原理及小组成员的研制过程。
关键词 无人机
1.理论探究
1.1概念与分类
1.1.1无人机的概念
无人机(unmanned aerial vehicle)是利用无线电遥控设备或自备的程序控制装置操控的不载人飞机,是飞行器的一种。
1.2.1无人机的分类
(1)按飞行平台构型划分
固定机翼无人机
多旋翼无人机
无人直升飞机
无人飞艇
伞翼无人机
扑翼无人机
(2)按用途及价格段位划分
1.2成品无人机公司排行榜(图1)
图1

1.3无人机的结构与组成部件
笔者根据无人机部件的功能,将结构大体分为三大系统:
1.3.1结构与动力系统
1.机架、起落架与布置形式
机架有F450、F550等形式。
起落架是无人机起飞与降落的重要部件。
布置形式有四旋翼X字型,六旋翼X字型,八旋翼共轴双桨型等型号。(图2)
图2
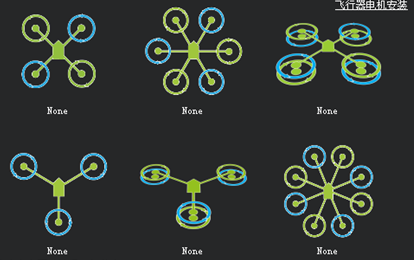
笔者所在小组研制的无人机(以下简称本组无人机)采用F450机架,四旋翼X型。
2.电动机
(1)本组无人机采用的是外转子直流电动机。
由于导通方式与换相原理涉及更高层次知识体系,故不加入介绍范围。
(2)指标参数:
型号:4位数字,前两位转子直径,后两位转子高度。
KV值:定义为转速处以电压,输入电压增加1V,空转转速增加值,电机一旦做好,KV固定不可改变。
效率:效率标注单位g/W,由于电机功率与推理并不成正比,故具体效率要看电机效率表。
磁极数:磁极数越多,转速越低,转矩越大。
3.螺旋桨
(1)以追求效率为第一目的
(2)指标参数:
型号:4位数字,前两位直径,后两位螺距(in)。
转动惯量:转动惯量越小,控制越灵敏。
桨叶数:2叶桨性能最佳。
安全转速:等同于最大转速。
4.(锂聚合物)电池
指标参数:
满电电压为12V左右。
串并联分别用S与P表示。
容量:单位:毫安时。
放电倍率:充放电电流大小,等于充放电电流/额定容量。
5.电子调速器(电调)
(1)功能:
最基本的功能就是给电机调速,有时充当换向器(无刷电 机)。
(2)指标参数:
电流:持续电流与在x秒内最大电流。
内阻:由焦耳定律知,内阻越大,发热量越大。
兼容性:与电机兼容性不良容易发生堵转现象。
(3)驱动:
方波驱动(数字信号)。
正弦波驱动(模拟信号)。
1.3.2控制与传感系统
1.传感器
下面是无人机常用的传感器:
加速度传感器、陀螺仪磁罗盘传感器、气压传感器、超声定位传感器、光流定位传感器、GPS(BDS)、电流计、空速计、OSD、FPV、数传。
2.飞行控制集成电路板(飞控)
(1)品牌:下面是市面上主流的飞控:
APM、零度智控飞控套件、大疆N3、A3、NAZA、ACE ONE.
(2)地位:飞控是无人机的大脑
1.3.3机载设备系统
机载设备系统对应无人机的功能或用途,常见的机载设备系统是云台,专业无人机则有机载灭火系统,机载空投系统等。
1.4无人机的飞行理论
1.4.1坐标系
坐标系有机体坐标系与地理坐标系两种。
1.4.2运动
无人机在X轴、Y轴、Z轴上进行位移被称为前后运动、左右运动、升降运动,无人机绕X轴、Y轴、Z轴旋转被称为横滚运动、俯仰运动、偏航运动。
1.4.3姿态描述与数学模型
由于姿态描述与数学模型涉及更高层次知识体系,故不加入介绍范围。
2、实践过程
1、组装
1.1人员介绍:
本组组长为于玺,其他组员为刘勃、万泽宇、杨皓天,摄影师为彭博。
1.2组装与调试过程:
共有三次:
(1)第一次组装:
参与人员:于玺、刘勃、万泽宇、杨皓天。
时间:2018.8.3
完成情况:基本组件组装完成。
(2)第二次组装:
参与人员:于玺、万泽宇。
时间:2018.8.4
完成情况:云台加装、调试完成。
(3)第三次检修:
参与人员:于玺、刘勃、万泽宇、杨皓天。
时间:2018.10.1
完成情况:FPV就绪,电池检测良好,耗材充足。
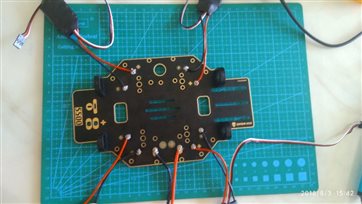
1.3组装图片展示:
图3为所有零件,图4为所有工具,图5是焊接好的PCB板。
图3

图4

图5
1.4成品照片:
图6为云台相机与遥控器接收机特写,图7右下角为无人机,左一左二分别为组员杨皓天、刘勃。
图6

图7

2、试飞
2.1试飞过程的基本信息
(1)时间:2018.10.2.上午九点至下午一点。
(2)天气:晴,西北风5级。
(3)地理位置:赤峰体育中心(图8)南部链球训练场外延及
体育馆二层平台。
图8

2.2分工
飞手:于玺,主摄影师:彭博,地面站监测:万泽宇,取景师:杨皓天观察员、副摄影:刘勃。
参考文献《轻松玩转多旋翼无人机》
参考网站 百度百科、CSDN、www.maigoo.com
地图工具Google Earth
视频处理工具Adobe After Effects、Adobe Premiere Pro




